Kako razširiti svoj epistemski mehurček?
V tem članku predstavljamo teorijo prediktivnega procesiranja, ki je v zadnjih letih predstavlja enega izmed najvplivnejših okvirjev razlage človeškega delovanja znotraj psihologije in kognitivne znanosti. Skozi to teorijo predstavljamo proces spoznavanja, ki zajema pridobivanje novega znanja. Znanje lahko razdelimo na »znano znanje«, »neznano znanje« in »neznano neznanje«, pri čemer je dostop do slednjega posamezniku zelo otežen, saj zajema »stvari, za katere ne ve, da jih ne ve«. Teorija prediktivnega procesiranja predpostavlja, da sistem skozi svoje delovanje teži k minimizaciji energije, zaradi česar se stvarem, ki so neznane, izogiba, kar otežuje dostop do neznanega neznanja. Kot strategijo, s katero posameznik maksimira možnosti, da pride do neznanega neznanja, v tem članku predstavljamo »početje nesmisla«, saj to zajema izvajanje dejavnosti, ki jih v običajnem delovanju ne bi nikoli izvajal in s tem torej omogoča pridobivanje novih izkušenj in informacij.
Uvod
Znanje posamezniku omogoča, da razume svet okoli sebe, predvidi posledice svojih dejanj in se zato v različnih situacijah vede bolj učinkovito (kar pomeni, da se v situacijah obnaša hitreje in zapravlja manj energije). Procesu pridobivanja znanja rečemo spoznavanje in zaradi stvari, ki jih znanje omogoča, je spoznavanje eden izmed najpomembnejših procesov posameznikovega delovanja (Chi idr., 1988; Eysenck in Keane, 2020).
V obdobju zadnjih deset let je ena izmed prevladujočih paradigem znotraj psihologije in kognitivne znanosti postala paradigma Bayesianskih možganov, katere glavna ideja je, da možgani delujejo kot napovedovalni stroj, ki ves čas posodabljajo model sveta (Friston idr., 2017). Znotraj nje pa je zelo razširjena teorija prediktivnega procesiranja, ki ponuja matematični okvir te paradigme (Friston, 2010).
Zaradi pomembnosti procesa spoznavanja in razširjenosti teorije prediktivnega procesiranja v tem članku predstavljamo to teorijo in razlagamo, kako lahko skozi njo razumemo proces spoznavanja. Prav tako pa skozi prizmo te teorije prikažemo, zakaj je mnogokrat težko priti do novega znanja in predstavljamo eno strategijo, ki lahko pri temu pomaga. Posamezniku lahko znanje o procesu spoznavanja omogoča, da lažje prepozna omejitve lastnih prepričanj in zavestno išče izkušnje, ki jih razširjajo, kar lahko povečuje kognitivno fleksibilnost in odpira možnosti za ustvarjalnejše reševanje problemov (Schraw in Dennison, 1994). Psihologiji pa lahko ta prispevek ponudi nov okvir za razumevanje procesa pridobivanja znanja ter njegovo prilagajanje predpostavkam te teorije.
Prediktivno procesiranje
Teorija prediktivnega procesiranja opisuje možgane kot napovedovalni stroj, ki z generativnim modelom sveta napoveduje zaznave in njihove pomene ter te napovedi nenehno primerja z dejanskimi senzornimi podatki (za poenostavitev bomo skozi članek napoved senzornega toka pojmovali kot »predhodno prepričanje«, dejanski senzorni tok pa kot »zaznavo«). Možgani to počnejo na več nivojih, od vidnega zaznavanja pa vse do oblikovanja prepričanj in reprezentacije pojmov, kar konkretno pomeni, da je celotne delovanje podvrženo zakonitostim tega mehanizma (Clark, 2013). Produkt primerjave zaznave in predhodnega prepričanja je »percept« (ki mu bomo v tem članku rekli »percepcija«), ki torej nikoli ni enak sami zaznavi, temveč je vedno prav tako tudi odvisen od predhodnega prepričanja. Ker predhodno prepričanje skoraj nikoli ni identično zaznavi, kot razlika med njima nastane napovedna napaka, ki jo želi sistem skozi svoje delovanje minimizirati, saj s tem prihrani na porabljeni energiji (Friston, 2010). Ilustracijo nastanka percepcije, kot kombinacije predhodnih prepričanj in zaznav vidimo na Sliki 1.
Slika 1
Percepcija kot kombinacija zaznav in napovedi sistema

Način, kako sistem skozi svoje delovanje zmanjša napovedno napako, je z mehanizmom aktivne inference. Ta narekuje, da lahko sistem bodisi posodobi predhodna prepričanja bodisi pa aktivno spremeni zaznave, ki jih prejema (Friston idr., 2017). Pomemben dejavnik, ki vpliva na to, katera izmed teh opcij bo izbrana, je gotovost sistema v posamezno predhodno prepričanje. Gotovost lahko razumemo kot stopnjo, do katere sistem zaupa v svojo predhodno prepričanje. Če je ta majhna, se verjetneje posodobi model sveta, v kolikor pa je velika, bo posameznik verjetneje izbral dejanja, ki vodijo k spremembi zaznav (Brown idr., 2013).
Opisan mehanizem ne temelji zgolj na teoretski razlagi in ne predstavlja psihološkega mehanizma (kot npr. kognitivna disonanca), temveč izhaja iz empiričnih nevroznanstvenih raziskav o delovanju možganov ter Bayesovih matematičnih modelov napovedovanja in sklepanja in jih tako torej razumemo kot osnovni nevrokognitivni mehanizem delovanja posameznika (Clark, 2013; Friston, 2010).
Primer aktivne inference
Posameznikovo delovanje po mehanizmu teorije prediktivnega procesiranja si lahko predstavljamo na primeru študenta prvega letnika psihologije, ki na predavanjih kognitivne psihologije prvič sliši za pojem »izvršilne funkcije«. Preden študent prvič sliši definicijo izvršilnih funkcij, ki pravi, da te posamezniku omogočajo inhibicijo ter načrtovanje, posameznik nima predhodnega prepričanja, s katerim bi si lahko ta pojem pojasnil oz. je gotovost v njegovo predhodno prepričanje majhna (Diamond, 2013). Majhna gotovost pomeni, da bi študent v trenutku preden bi slišal pravilno definicijo ob poskusu lastne razlage pojem oblikoval zgolj na podlagi ugibanja. Če bi moral hkrati na lestvici od ena do deset oceniti zaupanje v svojo definicijo, bi zaradi nizke gotovosti podal nizko oceno.
Torej zaradi velike razlike med predhodnim prepričanjem in zaznavo študent doživi veliko napovedno napako, ki jo poskusi minimizirati preko aktivne inference. Študent lahko tako bodisi preneha s poslušanjem predavanja (in s tem spremeni zaznave) bodisi pa s tem, da posodobi svoj notranji model pojma izvršilnih funkcij (Friston idr., 2017). Ker je gotovost v njegove predhodno prepričanje majhna, izbere slednjo opcijo, s čimer dobi pojem izvršilnih funkcij zanj pomen, ki ga je slišal na predavanju (pri tem »izbira« ni zavestna, temveč gre za izbiro kot reakcijo sistema). Ko se skozi semester s tem pojmom sreča še večkrat, se njegovo predhodno prepričanje za ta pojem povečuje in študent postaja v svoje napovedi vedno bolj gotov (torej vedno bolj je prepričan, da je njegova predstava o pojmu izvršilnih funkcij točna). Če zdaj na spletnem forumu zagleda članek, v katerem piše, da so izvršilne sposobnosti zadolžene za produkcijo čustev, doživi veliko napovedno napako, in ker je v tem primeru gotovost v njegovo napoved (da izvršilne funkcije omogočajo inhibicijo) velika, bo spremenil senzorni tok in prenehal z branjem tega članka (Brown idr., 2013).
Ustvarjanje in posodabljanje predhodnih prepričanj
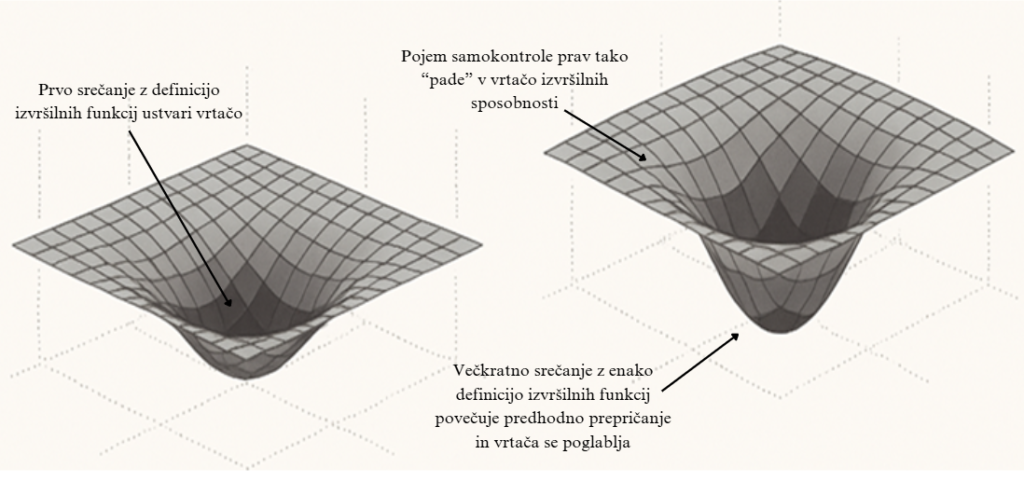
Proces oblikovanja predhodnega prepričanja lahko ponazorimo tudi z metaforo energijske pokrajine (»energy landscape«) (Wales, 2018). Ta predstavlja prostor vseh možnih stanj, ki jih generativni model sveta lahko zavzame. V začetnem stanju, ko so predhodna prepričanja šibka, je ta pokrajina razmeroma ravna. Vsaka zaznava »pade« na določeno točko v tej pokrajini pri čemer sproži posodobitev modela, povečanja predhodnega prepričanja, na pokrajini pa se ustvari »vrtača«. Tako se skozi čas v energijski pokrajini pojavi mnogo vrtač, ki se prepletajo in vplivajo ena na drugo. Po navadi pa postane ena vrtača (oz. predhodno prepričanje in gotovost vanj) največja in tako začne ta v energijski pokrajini delovati kot »atraktor«, h kateremu sistem skozi svoje delovanje teži (Clark, 2013; Friston, 2010). To pomeni, da sorodne zaznave, ki niso identične prvi, prav tako »padejo« v to vrtačo. Na našem primeru si to lahko predstavljamo tako, da študent pri poslušanju seminarja o samokontroli to razloži kot posledico delovanja izvršilnih funkcij, čeprav vsebina predavanja ni omenjala kognitivnih mehanizmov samokontrole. Do tega je prišlo, ker je predhodno prepričanje izvršilnih funkcij za študenta postalo tako močno, da jih je »videl« v vseh stvareh, ki bi lahko bile vsaj malo povezane z njimi. S tem torej vidimo, da lahko močna predhodna prepričanja vplivajo na več področij posameznikovega delovanja.
Mehanizem spremembe zaznav, ko je gotovost v predhodno prepričanje velika, pa pri tej metafori pojasnimo tako, da bi moral sistem porabiti veliko energije, če bi želel spremeniti obliko globoke vrtače (Wales, 2018). Zaradi težnje po minimizaciji energije tega ne želi storiti in tako raje izbere zaznave, ki ne povzročajo napovedne napake. Poenostavljeno ilustracijo delovanja energetske pokrajine z eno veliko vrtačo na primeru študenta vidimo na Sliki 2.
Slika 2
Večanja predhodnega prepričanja kot oblikovanje vrtače na energijski pokrajini
Spoznavanje in neznano neznanje
V prejšnjem primeru smo predstavili proces aktivne inference in posodabljanja posameznikovega modela sveta, vendar pa to samo po sebi ni proces spoznavanja. Spoznavanje je aktivnost, ki omogoči, da se model sploh lahko posodobi, torej aktivno usmerjanje senzornega toka proti dražljajem, ki sprožijo takšno posodobitev (Friston, 2010). V primeru študenta je to zajemalo, da je šel na predavanja in se tam obrnil proti profesorju, ki je predaval o izvršilnih funkcijah.
Pri tem pa se lahko vprašamo, na kakšen način lahko posameznik pride do novega znanja in ali je to težko. Da odgovorimo na ta vprašanja, moramo znanje z vidika posameznika razdeliti na znano znanje, znano neznanje in neznano neznanje. Znano znanje predstavljajo stvari za katere »veš, da jih veš« (npr. preden je študent iz prejšnjega primera začel študirati psihologijo je poznal pojma instrumentalno in klasično pogojevanje). Znano neznanje so stvari za katere »veš, da jih ne veš«, ampak veš kako do njih priti (npr. študent je vedel, da v možganih potekajo različni procesi, vendar ni vedel, katera možganska področja so za posamezne procese zadolžena). Neznano neznanje pa zajema stvari za katere »ne veš, da jih ne veš« in zaradi tega do njih z namerno dejavnostjo ne moreš priti (npr. študent ni vedel, da obstaja pojem izvršilnih funkcij, zaradi česar zanj ni obstajal način, kako bi lahko z namerno aktivnostjo ta pojem iskal) (Kerwin, 1993).
»Epistemsko lego« teh pojmov lahko opišemo z izrazom epistemski mehurček. Znotraj njega ležijo znana in neznana znanja, do katerih posameznik lahko dostopa, medtem pa se za njegovim obzorjem nahajajo neznana neznanja, do katerih ne more. Skozi teorijo prediktivnega procesiranja pa epistemski mehurček pojasnimo, kot posameznikovo trenutno konfiguracijo njegovih predhodnih prepričanj. Torej poleg same lege znanj za obzorjem mehurčka, posamezniku dostop do teh znanj otežuje način posameznikovega delovanja po katerem teži k minimizaciji napovedne napake, zaradi česar zaznave ne le interpretira v skladu s svojimi predhodnimi prepričanji, temveč se zaznavam, ki bi povzročile veliko napovedno napako tudi aktivno izogiba (Friston, 2010).
Naključnost in nesmiselnost
Po teoriji prediktivnega procesiranja lahko posameznik svoj model posodobi le, če pride do velike napovedne napake ob nizki gotovosti v predhodno prepričanje (Friston, 2010; Brown idr., 2013). To pa pomeni, da lahko do neznanega neznanja pride šele ob stiku z novimi zaznavami oziroma z vnosom naključnosti v zaznavni proces (Friston, 2010). Pri tem se torej pojavi vprašanje, kako vnesti naključnost v vsakdanje življenje in ali je to sploh možno? V primeru našega študenta je naključnost predstavljal njegov obisk predavanja. Podobno v vsakdanjem življenju obstaja nekaj naključnosti, ko na primer na zabavi spoznamo novo osebo, na socialnih omrežjih zagledamo članek o temi, za katero še nismo slišali ali pa nam prijatelj pove zgodbo, ki se mu je zgodila prejšnji vikend. Pomanjkljivost te naključnosti pa je, da mnogokrat ni radikalno drugačna od večine naših običajnih zaznav (npr. razen če smo psiholog, bi težko rekli, da so teme na predavanjih kognitivne psihologije radikalno drugačne od tem, ki se predavajo pri predmetu uvod v psihologijo). Neznana neznanja tako razdelimo na tista, ki so bližje in tista, ki so od roba epistemskega mehurčka bolj oddaljena, pri čemer v tem članku iščemo odgovor kako priti do slednjih, saj imajo tista, ki so bližje robu večjo verjetnost, da bodo »padla v vrtačo« že obstoječega predhodnega prepričanja (Friston, 2010; Friston idr., 2017).
Strategija, ki bi maksimirala verjetnost, da pridemo v stik z znanjem daleč od roba epistemskega mehurčka, mora torej vsebovati aktivno iskanje zaznav, s katerimi se skozi svoje »običajno« delovanje verjetno ne bi srečali. Strategija, ki lahko to omogoča je početje »nesmiselnih« stvari. Te opišemo kot dejanja ali odločitve, ki se zdijo brezciljne, neučinkovite ali nepotrebne, iz česar vidimo, da vsebujejo izvajanje aktivnosti, ki je posameznik skozi »običajno« delovanje ne bi nikoli izvajal. Tako nudijo dobro verjetnost, da posameznika privedejo do radikalno drugačnih zaznav in posledično znanj, ki so zelo oddaljena od robov epistemskega mehurčka. Na primeru našega študenta bi to izgledalo tako, da bi namesto na predavanje odšel v park in se tam pogovarjal z naključnimi mimoidočimi o stvareh, ki te mimoidoče zanimajo, s čimer predvidevamo, da bi izvedel nekaj popolnoma novega in tako razširil svoj epistemski mehurček.
Prednosti in slabosti optimizacije
Doslej smo pokazali, da sistemi v skladu z načelom minimizacije proste energije skozi delovanje postopno utrjujejo svoja predhodna prepričanja ter selektivno vzorčijo okolja, v katerih se njihove napovedi najzanesljiveje potrjujejo, zaradi česar so pri svojem delovanju bolj učinkoviti (Friston, 2010). Prav tako pa smo predstavili strategijo, ki lahko omogoči, da sistem posodobi in spremeni njegovo konfiguracijo. Za zaključek pa bi predstavili še prednosti in slabosti tega, da sistemi oz. ljudje delujemo po principu minimizacije proste energije ter situacijo, v kateri je širjenje epistemskega mehurčka lahko nekaj pozitivnega.
Da lažje ponazorimo te vidike, bi proces pridobivanja in posodabljanja znanja ponazorili še na primeru robota, ki išče optimalno pot skozi labirint. Ko začne robot raziskovati labirint, s tem nima nobenih izkušenj, zato skozi premikanje po labirintu ob razpotjih vedno izbere naključno pot, dokler ne pride do izhoda, pri čemer si vse svoje odločitve zapomni. Nato začne od začetka, pri čemer ima možnost, da vse korake ponovi ali pa na določenih mestih naključno izbere drugo smer. Tej dilemi pravimo izbiranje med »izkoriščanjem in raziskovanjem« (»exploitation vs. exploration«) in ponavadi je razrešena tako, da robot na začetku učenja preferira raziskovanje, proti koncu pa izkoriščanje. To temelji na predpostavki, da na začetku optimalna pot ni znana, skozi učenje pa naj bi se jo čedalje bolj naučil. Robot torej na začetku učenja večkrat izbere naključno pot, proti koncu pa vedno večkrat izbere poti za katere misli, da ga bodo najhitreje privedle do cilja (Sutton in Barto, 1998). Delovanje robota je torej enako delovanju posameznika, saj se tudi pri njem po tem, ko določena predhodna prepričanja postanejo močnejša, posodabljajo čedalje manj (Brown idr., 2013).
Na primeru robota vidimo, da, v kolikor se nauči optimalno pot je skozi svoje delovanje bolj učinkovit, zaradi česar zapravi manj časa v labirintu in hitreje najde pot iz njega. Na enak način je posameznik v svojem delovanju bolj učinkovit, ko se skozi učenje njegova predhodna prepričanja ustvarijo in ustalijo. Na to gledamo kot na nekaj pozitivnega, ko so ta usklajena s splošnim konsenzom o »optimalnih predhodnih prepričanjih«. Primer tega je znanje kuhanja, ki posamezniku omogoča, da pripravlja jedi, brez da bi mu bilo potrebno preverjati vse sestavine in postopke v receptu. Po drugi strani pa kljub temu, da je lahko posameznik v svojem delovanju bolj učinkovit, lahko njegova predhodna prepričanja zavzamejo stanje, v katerem jih smatramo kot »škodljiva«. Primer tega je, ko posameznik verjame v teorije zarote, ali poseduje močne predsodke, zaradi katerih sicer zelo hitro oblikuje zaključke, vendar nanje običajno gledamo kot na »škodljive oz. nezaželene«.
Poleg tega pa obstaja še en vidik, zakaj je to, da se predhodna prepričanja skozi čas posodabljajo čedalje manj, lahko nekaj negativnega. To predstavlja nekaj negativnega v situaciji, ko bi optimalna strategija delovanja zajemala širjenje epistemskih meja. S tem pridemo do pomembne razlike med robotom, ki išče optimalno pot skozi labirint, in posameznikom, ki deluje v svetu. Robot ima pri iskanju poti skozi labirint le en cilj, po drugi strani pa ima posameznik v svojem delovanju mnogo ciljev na katere vpliva hkrati (npr. ko gre študent k pouku s tem doseže cilj učenja, ne doseže pa cilja gledanja svoje najljubše serije). Prav tako pa se pri posamezniku skozi njegovo delovanje ustvari več predhodnih prepričanj, za razliko od robota (ki ima le predhodno prepričanja premikanja po labirintu). Zaradi tega so lahko predhodna prepričanja, ki so v posamezni domeni zelo učinkovita, v drugi ovira. Kot primer si lahko predstavljamo študenta iz prejšnjih primerov in predpostavimo, da je postal zelo izučen nevroznanstvenik, ki v svoji domeni rešuje mnogo problemov (npr. pomaga ljudem z nevrološkimi bolezni). Če se tak posameznik loti problema v drugi domeni, ki se zdi sorodna, bo ta predhodna prepričanja poskusil uporabiti in si z njimi pomagati. Na primer pri raziskovanju zavesti bo na zavest gledal kot na stvar, ki jo lahko najdemo v možganih. Pri tem pa ima ta pristop mnogo pomanjkljivosti (ki za ta članek niso relevantne) in se jih naš nevroznanstvenik ne zaveda, saj se nahaja v svojem epistemskem mehurčku (Seth in Bayne, 2022). V tem in podobnih primerih, ko ne poznamo optimalne strategije reševanja domenske problematike je zato mnogokrat najprimernejša strategija širitve epistemskih meja in sprejemanje odločitev po tem.
Pomanjkljivost teorije prediktivnega procesiranja
Ena od najpomembnejših pomanjkljivosti teorije prediktivnega procesiranja je, da smo skozi članek predpostavili, da si posameznik aktivno dejavnost, s katero izbira zaznave iz okolja, lahko izbira sam. Ker teorija pri aktivni inferenci opisuje, da sistem izbere med posodabljanjem notranjega modela in spremembo zaznav, je lahko to razumljeno kot zavestna odločitev posameznika, pri čemer je v tem implicitno predpostavljena svobodna volja v posameznikovem delovanju. Debata o svobodni volji sicer presega obseg tega članka, vendar njega predpostavka predstavlja zelo pomembno omejitev, ki se jo je potrebno zavedati.
Zaključek
V tem članku smo s teorijo prediktivnega procesiranja predstavili, da se skozi posameznikovo delovanje oblikuje epistemski mehurček. Ob konsolidaciji predhodnih prepričanj lahko ta posamezniku omogoča, da je v svojem delovanju bolj učinkovit, kar ima tako prednosti kot slabosti. Posebno slabost to predstavlja v domenah, kjer nimamo konsezna o optimalni konfiguraciji predhodnih prepričanj, zaradi česar v tem članku zaključujemo, da je v takih situacijah najboljša strategija poskus širitve epistemskih meja. Kot strategijo, ki lahko to omogoča smo predlagali početje nesmisla, ki je torej nekaj h čemur bi morali v svoji dejavnosti večkrat stremeti.
Reference
Brown, H., Adams, R. A., Parees, I., Edwards, M. in Friston, K. (2013). Active inference, sensory attenuation and illusions. Cognitive Processing, 14(4), 411–427. https://doi.org/10.1007/s10339-013-0571-3
Chi, M. T. H., Glaser, R. in Farr, M. J. (ur.). (1988). The nature of expertise (1. izd.). Psychology Press. https://doi.org/10.4324/9781315799681
Clark, A. (2013). Whatever next? Predictive brains, situated agents, and the future of cognitive science. Behavioral and Brain Sciences, 36(3), 181–204. https://doi.org/10.1017/S0140525X12000477
Diamond, A. (2013). Executive functions. Annual Review of Psychology, 64, 135–168. https://doi.org/10.1146/annurev-psych-113011-143750
Eysenck, M. W. in Keane, M. T. (2020). Cognitive psychology: A student’s handbook (8. izd.). Psychology Press. https://doi.org/10.4324/9781351058513
Friston, K. (2010). The free-energy principle: A unified brain theory? Nature Reviews Neuroscience, 11(2), 127–138. https://doi.org/10.1038/nrn2787
Friston, K., FitzGerald, T., Rigoli, F., Schwartenbeck, P. in Pezzulo, G. (2017). Active inference: A process theory. Neural Computation, 29(1), 1–49. https://doi.org/10.1162/NECO_a_00912
Kerwin, A. (1993). None too solid. Knowledge, 15(2), 166–185. https://doi.org/10.1177/107554709301500204
Schraw, G. in Dennison, R. S. (1994). Assessing metacognitive awareness. Contemporary Educational Psychology, 19(4), 460–475. https://doi.org/10.1006/ceps.1994.1033
Seth, A. K. in Bayne, T. (2022). Theories of consciousness. Nature Reviews Neuroscience, 23(7), 439–452. https://doi.org/10.1038/s41583-022-00587-4
Sutton, R. S. in Barto, A. G. (1998). Reinforcement learning: An introduction. MIT Press.
Wales, D. J. (2018). Exploring energy landscapes. Annual Review of Physical Chemistry, 69(1), 401–425. https://doi.org/10.1146/annurev-physchem-050317-021219


You May Also Like

Življenje v času podnebne panike: razumevanje in soočanje s podnebno tesnobo

Ali se izvajanje in doživljanje medvrstniškega nasilja povezujeta z medosebnim nezaupanjem na prehodu v odraslost?
